- トップページ >> プロダクトセンター >> ロボット自動テストシステム
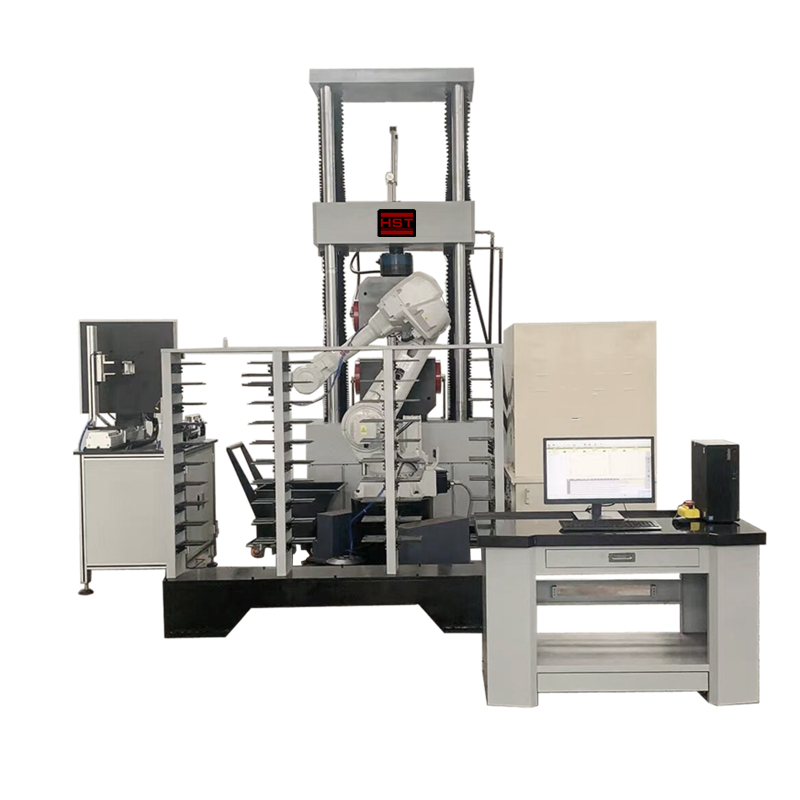
450J 750Jロボット自動的に低温振り子衝撃試験機

制品详细
導入
このマシンにはロボットシステムが装備されており、標本の充電、給餌、衝撃テストを自動的に実現します。
特徴
サンプルクランプと協力して、標本を拾って輸送するために、6軸ロボットの高い柔軟性。
ロボットは視覚システムによって制御されます。サンプルのノッチ特性を識別することにより、ロボットには、0.1mmの精度でノッチポジショニングを達成するためのモーション補償が与えられます。
低温チャンバーの蓋が自動的に開閉され、閉じられて、サンプリングが必要なときに自動開閉を実現し、サンプリング後に自動閉鎖を完了して、低温チャンバーの温度制御の精度を確保します。
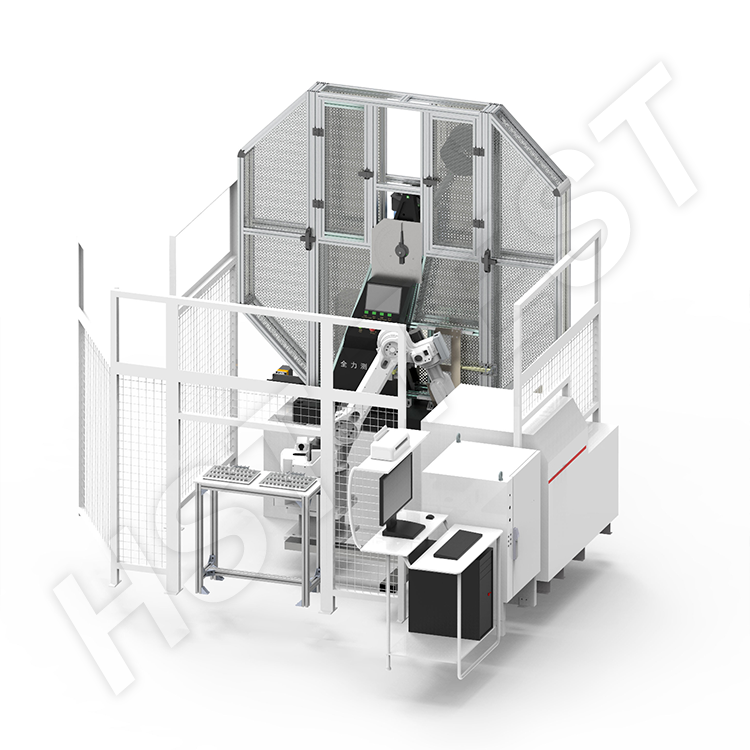
サンプルは、サンプルトレイを積み重ね、40のサンプルを単一のトレイに保存して、120のサンプルを連続的に暖かく保持する必要性を満たすことによって配置されます。
操作をより安全にするためのロボットを使用した自動サンプル給餌。
プロダクトパラメータ
モデル | HST450H-AR | HST750H-AR |
マックス。衝撃エネルギー(J) | 450 | 750 |
サポートの軸からパーカッションの中心までの距離 | 750mm | |
標本量 | 120 | |
標本給餌時間 | ≤4s | |
ポジショニング精度(mm) | 0.3よりも優れています | |
再現性(mm) | ±0.03 | |
標本(mm) | 2.5×10×55(アンビルを変更) | |
5×10×55 | ||
7.5×10×55 | ||
10×10×55 | ||
温度範囲(℃) | 0〜-80 | |
温度変動(℃) | ±0.5 | |
温度の均一性(℃) | ±1 | |
体重(kg) | 900(マシン)+300(ロボット) | |
電源 | 1相、220V±10%、50Hz、5.5kW | |
ロボット、長さx幅x高さ、mm | 2100×835×1400 | |
占有スペース(mm2)) | 4.5×2.8 |
には
| Name | Download |
|---|