
























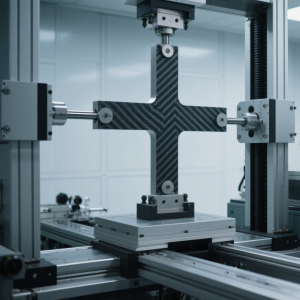
多軸応力は、十字形の標本を示します
ほとんどのエンジニアリング構造は、負荷、形状、および/または物質的な不均一性から生じる複雑な多軸応力の影響を受けます。ただし、実験室では、クリープ、準静的、疲労試験など、ストレスの単軸状態にさらされる単純な標本を含むさまざまな種類の負荷体制を使用しています。設計ベースの一軸テストデータと多軸ストレスを伴うコンポーネントの機能的動作とのコントラストのため、2つの関係が適切に理解されるように、より多くの研究作業が行われています。
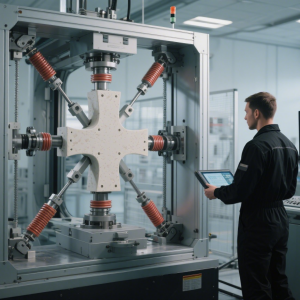
二軸テストに直接貸し出す標本は、4つの直交アクチュエーターによって面内で搭載された十字形(クロス型プレート)です。標本の動きを制御するためのテストシステムを開発しました中心、不要な動きを除去し、標本の曲げ。従来型でサーボヒドラウリック試験装置の一方の端は固定的に保持され、もう一方の端はアクチュエータによる張力または圧縮で変位します。ほとんどのテストでは、これは非常に満足のいく動作方法ですが、それは中心テストサイクル中に標本の動き。一部のテストでは、保持する必要があります中心標本の定常 - たとえば、研究するのが必要な場合中心検査中に顕微鏡を介した標本の。このタイプのテストでは、2番目のアクチュエータがシステムに追加され、検体の両端に変形の動きを適用できるようにします。したがって、制御すべき2つのアクチュエーターと2つの変数があります。中心標本の位置、および標本の端に総変形が適用されます。アクチュエーターの自然なペアリングと制御された変数がないため、各アクチュエータの動きが両方に影響するため、コントロールの問題が発生します。中心試験片の位置と変形。
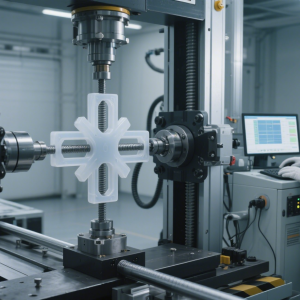
試験片の各端の等しい変形は、中心位置;同じ方向の各アクチュエータの変位は中心変形を変更せずに位置。各ループは独立して動作し、アクチュエーターへのフェーズ内ドライブシグナルとフェーズ外ドライブの間に相互作用はありません。対立する2つのアクチュエーターについて説明されているように、この原則は、4つのアクチュエーターを使用した十字形のテストにも適用できます。テストは、ひずみおよび負荷制御モードで実行することもできます。最近インストールされたCruciformシステムは、複雑なTMFテスト用に設計されています。測定された総ひずみ信号は、熱膨張および弾性ひずみ含有量に関してリアルタイムで修正する必要があります。
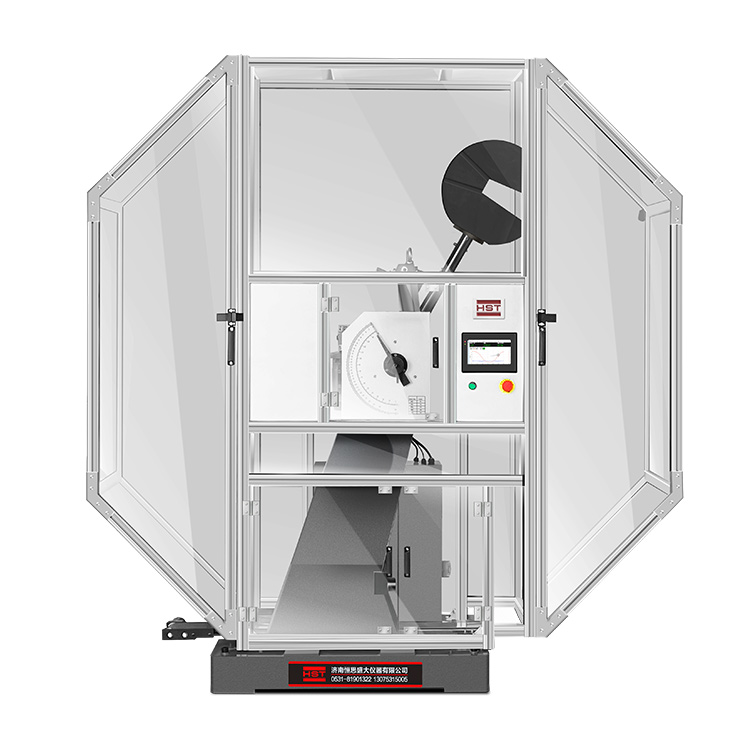
私たちの十字形のシステム、100knまたは250kn容量は、標本試験の優れた制御を提供する高忠実度のシールレス、静水圧ベアリングアクチュエーターとともに、高度に整列した硬直した負荷フレームを提供します。このロードシステムは、デジタルコントローラーと私たちの新しいものとよく一致しています複雑で多軸テストのための直感的なユーザーインターフェイスを提供する動的テストソフトウェア。

©2025 Jinan Kason Testing Equipment Co.、Ltd。